A collection of 3D coordinates (point3d), which are regarded as endpoints of a 3D laser scan. More...
 Collaboration diagram for octomap::Pointcloud:
Collaboration diagram for octomap::Pointcloud: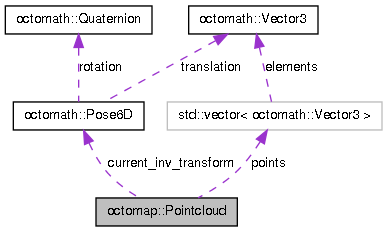
Public Types | |
| typedef point3d_collection::const_iterator | const_iterator |
| typedef point3d_collection::iterator | iterator |
Public Member Functions | |
| point3d | back () |
| const_iterator | begin () const |
| iterator | begin () |
| void | calcBBX (point3d &lowerBound, point3d &upperBound) const |
| Calculate bounding box of Pointcloud. | |
| void | clear () |
| void | crop (point3d lowerBound, point3d upperBound) |
| Crop Pointcloud to given bounding box. | |
| iterator | end () |
| const_iterator | end () const |
| point3d | getPoint (unsigned int i) |
| void | minDist (double thres) |
| Pointcloud (Pointcloud *other) | |
| Pointcloud () | |
| Pointcloud (const Pointcloud &other) | |
| void | push_back (float x, float y, float z) |
| void | push_back (const point3d &p) |
| void | push_back (point3d *p) |
| void | push_back (const Pointcloud &other) |
| Add points from other Pointcloud. | |
| std::istream & | read (std::istream &s) |
| std::istream & | readBinary (std::istream &s) |
| void | reserve (size_t size) |
| void | rotate (double roll, double pitch, double yaw) |
| Rotate each point in pointcloud. | |
| size_t | size () const |
| void | subSampleRandom (unsigned int num_samples, Pointcloud &sample_cloud) |
| void | transform (pose6d transform) |
| Apply transform to each point. | |
| void | transformAbsolute (pose6d transform) |
| Apply transform to each point, undo previous transforms. | |
| std::ostream & | writeBinary (std::ostream &s) const |
| void | writeVrml (std::string filename) |
| Export the Pointcloud to a VRML file. | |
| ~Pointcloud () | |
Protected Attributes | |
| pose6d | current_inv_transform |
| point3d_collection | points |
Detailed Description
A collection of 3D coordinates (point3d), which are regarded as endpoints of a 3D laser scan.
Member Typedef Documentation
| typedef point3d_collection::const_iterator octomap::Pointcloud::const_iterator |
| typedef point3d_collection::iterator octomap::Pointcloud::iterator |
Constructor & Destructor Documentation
| octomap::Pointcloud::Pointcloud | ( | ) |
| octomap::Pointcloud::~Pointcloud | ( | ) |
References clear().
| octomap::Pointcloud::Pointcloud | ( | const Pointcloud & | other | ) |
| octomap::Pointcloud::Pointcloud | ( | Pointcloud * | other | ) |
Member Function Documentation
| iterator octomap::Pointcloud::begin | ( | ) | [inline] |
References points.
Referenced by calcBBX(), octomap::OccupancyOcTreeBase< NODE >::computeUpdate(), crop(), octomap::OccupancyOcTreeBase< NODE >::insertScanNaive(), minDist(), Pointcloud(), push_back(), subSampleRandom(), and writeBinary().
| const_iterator octomap::Pointcloud::begin | ( | ) | const [inline] |
References points.
Calculate bounding box of Pointcloud.
| void octomap::Pointcloud::clear | ( | ) |
References points.
Referenced by crop(), minDist(), and ~Pointcloud().
Crop Pointcloud to given bounding box.
References begin(), clear(), end(), and push_back().
Referenced by octomap::ScanGraph::crop().
| iterator octomap::Pointcloud::end | ( | ) | [inline] |
References points.
Referenced by calcBBX(), octomap::OccupancyOcTreeBase< NODE >::computeUpdate(), crop(), octomap::OccupancyOcTreeBase< NODE >::insertScanNaive(), minDist(), Pointcloud(), push_back(), subSampleRandom(), and writeBinary().
| const_iterator octomap::Pointcloud::end | ( | ) | const [inline] |
References points.
| point3d octomap::Pointcloud::getPoint | ( | unsigned int | i | ) |
References OCTOMAP_WARNING, and points.
| void octomap::Pointcloud::minDist | ( | double | thres | ) |
References begin(), clear(), end(), and push_back().
| void octomap::Pointcloud::push_back | ( | float | x, |
| float | y, | ||
| float | z | ||
| ) | [inline] |
| void octomap::Pointcloud::push_back | ( | const Pointcloud & | other | ) |
Add points from other Pointcloud.
| std::istream & octomap::Pointcloud::read | ( | std::istream & | s | ) |
References push_back().
| std::istream & octomap::Pointcloud::readBinary | ( | std::istream & | s | ) |
References OCTOMAP_DEBUG, OCTOMAP_ERROR, points, push_back(), and octomath::Vector3::readBinary().
Referenced by octomap::ScanNode::readBinary().
| void octomap::Pointcloud::reserve | ( | size_t | size | ) | [inline] |
References points.
| void octomap::Pointcloud::rotate | ( | double | roll, |
| double | pitch, | ||
| double | yaw | ||
| ) |
Rotate each point in pointcloud.
References points.
| size_t octomap::Pointcloud::size | ( | ) | const [inline] |
References points.
Referenced by octomap::OccupancyOcTreeBase< NODE >::insertScanNaive(), octomap::ScanGraph::readPlainASCII(), subSampleRandom(), and writeBinary().
| void octomap::Pointcloud::subSampleRandom | ( | unsigned int | num_samples, |
| Pointcloud & | sample_cloud | ||
| ) |
References begin(), end(), push_back(), and size().
| void octomap::Pointcloud::transform | ( | pose6d | transform | ) |
Apply transform to each point.
References current_inv_transform, octomath::Pose6D::inv(), points, and octomath::Pose6D::transform().
Referenced by octomap::ScanGraph::crop(), octomap::OccupancyOcTreeBase< NODE >::insertScan(), and transformAbsolute().
| void octomap::Pointcloud::transformAbsolute | ( | pose6d | transform | ) |
Apply transform to each point, undo previous transforms.
References current_inv_transform, octomath::Pose6D::inv(), points, octomath::Pose6D::transform(), and transform().
Referenced by octomap::ScanGraph::crop().
| std::ostream & octomap::Pointcloud::writeBinary | ( | std::ostream & | s | ) | const |
References begin(), end(), OCTOMAP_DEBUG, and size().
Referenced by octomap::ScanNode::writeBinary().
| void octomap::Pointcloud::writeVrml | ( | std::string | filename | ) |
Export the Pointcloud to a VRML file.
References OCTOMAP_DEBUG_STR, and points.
Referenced by octomap::MapCollection< MAPNODE >::writePointcloud().
Field Documentation
pose6d octomap::Pointcloud::current_inv_transform [protected] |
Referenced by transform(), and transformAbsolute().
point3d_collection octomap::Pointcloud::points [protected] |
Referenced by back(), begin(), clear(), end(), getPoint(), Pointcloud(), push_back(), readBinary(), reserve(), rotate(), size(), transform(), transformAbsolute(), and writeVrml().
The documentation for this class was generated from the following files:
- include/octomap/Pointcloud.h
- src/Pointcloud.cpp
